

Para los negacionistas conspiranoicos que ya andaban diciendo que como es eso que no hay video de la llegada del Perseverance a la superficie de Marte, aqui está.
Una serie de imágenes del amartizaje del quinto rover a Marte estarán en la historia de la exploración del cosmos. El pasado 18 de febrero de 2021, la NASA volvió a hacer historia, esta vez con el Perseverance, el vehículo con ruedas más avanzado y ambicioso que haya sido puesto en la superficie de otro planeta.
Por otra parte esta es la nave espacial que más cámaras ha llevado para documentar su amartizaje. Y no solo cámaras, también incluye un micrófono, que no es el primero en Marte, pero sí el primero que ha logrado grabar el sonido del viento directamente de la atmósfera.
Este lunes se ha visto el resultado de este despliegue audiovisual es una enorme cantidad de imágenes y vídeos que han ido llegando poco a poco desde Marte a lo largo de estos últimos días.
Los vídeos publicados son espectaculares y fueron combinados para producir esta visual fabulosa de la llegada al planeta Marte.
La secuencia del despliegue del paracaídas de 21,5 metros, el más grande de la historia de la exploración de Marte, es la toma inicial. El paracaídas tenía que ser más amplio que el de Curiosity (MSL) debido a la mayor masa del rover, pero, al mismo tiempo, no podía ocupar un volumen mayor. En el vídeo se puede ver el despliegue y posterior inflado del paracaídas a velocidades supersónicas (unos 1600 km/h). Uno de los fragmentos que sale volando es el radomo de una de las antenas de baja ganancia, aunque sin consecuencias, afortunadamente. Es la primera vez que vemos cómo se infla un paracaídas en una atmósfera alienígena.
A continuación el video deja ver la secuencia el descenso a la superficie gracias a una cámara situada en el chasis del rover. Se aprecian las oscilaciones producidas durante la etapa de descenso en paracaídas y cómo esas oscilaciones cesan al separarse la etapa de descenso con el rover. También se ve claramente la maniobra de evasión para evitar una colisión con el escudo térmico trasero (backshell) con el paracaídas y, en la etapa final, podemos ver la polvareda que levanta el escape de los motores de la etapa de descenso.
La última parte que recoge la maniobra sky crane, grabada por una cámara en la etapa de descenso que apuntaba al rover y, al mismo tiempo, por otra cámara en el rover apuntando a la etapa de descenso, es espectacular.
El vídeo recoge el despliegue del rover bajo la etapa de descenso cuando comienza la maniobra sky crane. Perseverance se descuelga de la etapa mediante tres cables de nylon de 7,6 metros y un umbilical que conecta la etapa con el rover. La etapa está descendiendo en esos momentos a una velocidad constante de unos 2,7 km/h gracias a cuatro de los ocho motores de hidrazina de los que dispone. Este umbilical se encarga de suministrar electricidad y controlar la etapa de descenso (aunque dispone de un ordenador propio, está dirigida por los dos ordenadores redundantes del rover). Por este umbilical también se han enviado las imágenes que acabamos de ver con el fin de ser almacenadas en la memoria de Perseverance antes de la separación de la etapa, que se estrelló poco después a más de 150 metros de distancia. La siguiente imagen —de Curiosity/MSL— refleja la configuración del vehículo durante la maniobra sky crane y sirve para entender qué estamos viendo en estos vídeos.
El vídeo más llamativo es el de la etapa de descenso filmada desde el rover. Se sienten las oscilaciones del rover colgando bajo la etapa (aunque lo que en realidad oscilaba era el vehículo, no la etapa, lógicamente). Mucha gente se ha sorprendido porque no se aprecia el escape de los motores, pero no olvidemos que la etapa de descenso usaba un sistema de propulsión monopropelente a base de hidrazina, sin oxidante que genere una combustión (para este combustible, el oxidante sería tetraóxido de dinitrógeno). Los productos de escape de este sistema son nitrógeno e hidrógeno, dos gases transparentes. Además, los escapes de motores cohete en el vacío o en atmósferas poco densas sin oxígeno, como la de Marte, son muy poco llamativos. Solo cuatro de los ocho motores estaban funcionando en ese momento (los que tienen las toberas apuntando más hacia afuera).
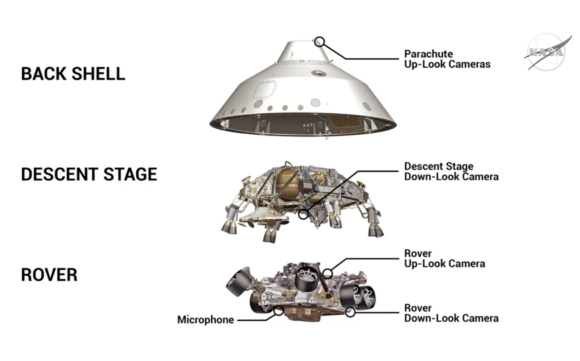
Según la NASA, las imágenes han sido grabadas mediante el sistema EDLCAM, que incluye cuatro conjuntos de cámaras comerciales. Las tres cámaras redundantes PUC (Parachute Uplook Cameras), situadas en el escudo térmico trasero (backshell), filmaron el despliegue del paracaídas. La cámara RDC (Rover Downlook Camera), la equivalente de MARDI, grabó el descenso a 30 fps hasta la superficie desde la parte inferior del rover a partir de la separación del escudo térmico, mientras que la DDC (Descent stage Downlook Camera) hizo lo propio a 12 fps desde la etapa de descenso a partir del inicio de la maniobra sky crane. La cámara RUC (Rover Uplook Camera) fue la encarga de filmar la etapa de descenso a 30 fps desde la parte superior del rover. Como curiosidad, el sistema EDLCAM está gestionado por un ordenador comercial de tipo PC con un procesador Intel Atom bajo Linux. Aunque Ingenuity también lleva software open source, por ahora está hibernando, por lo que podemos decir que esta ha sido la primera vez que se usa Linux en la superficie de Marte.
Además de imágenes, el sistema EDLCAM ha sido capaz grabar sonido gracias a un micrófono. Sí, el primer micrófono que funciona en Marte.
El audio no es gran cosa, pero el hecho de que la brisa en un planeta alienígena suene tan familiar me parece algo mágico. El micrófono —un modelo DPA 4006— funciona a una frecuencia de 48 kHz, digitalizados a 24 bits (más adelante se podrá usar otro micrófono que lleva el instrumento francés SuperCam). Desgraciadamente, no fue posible grabar el audio durante la fase EDL.
Un nuevo logro de la ciencia y la técnica humana en la exploración espacial.

Notas de las mejores agencias de noticias internacionales.







